
Experimental Validation of Ellipsoidal Techniques for State Estimation in Marine Applications


Abstract
:1. Introduction
2. Autonomous DDboats
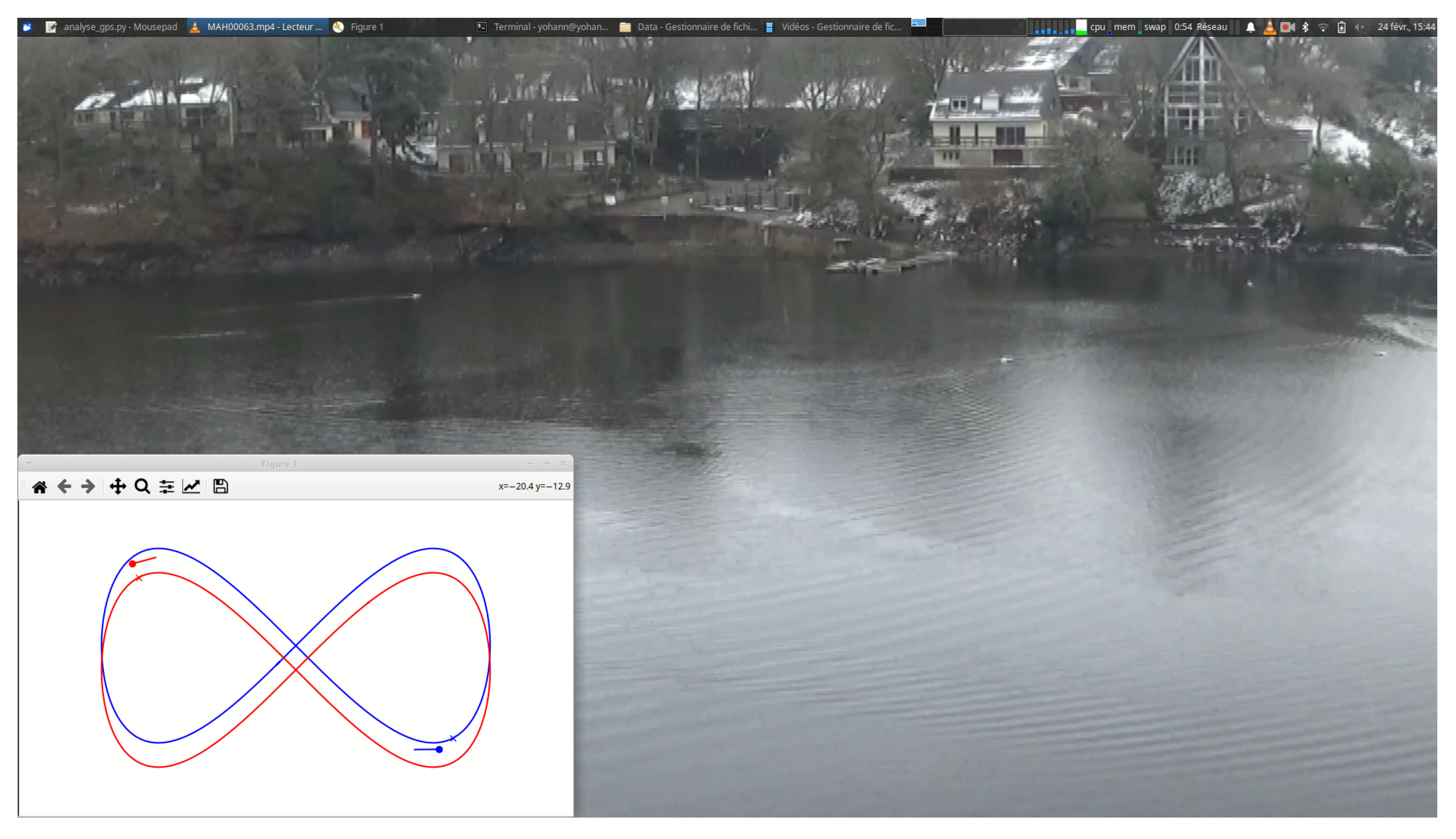
2.1. Specification of Reference Trajectories
2.2. Tracking Control by Means of an Artificial Potential Field Method
2.3. Modeling of the DDboats
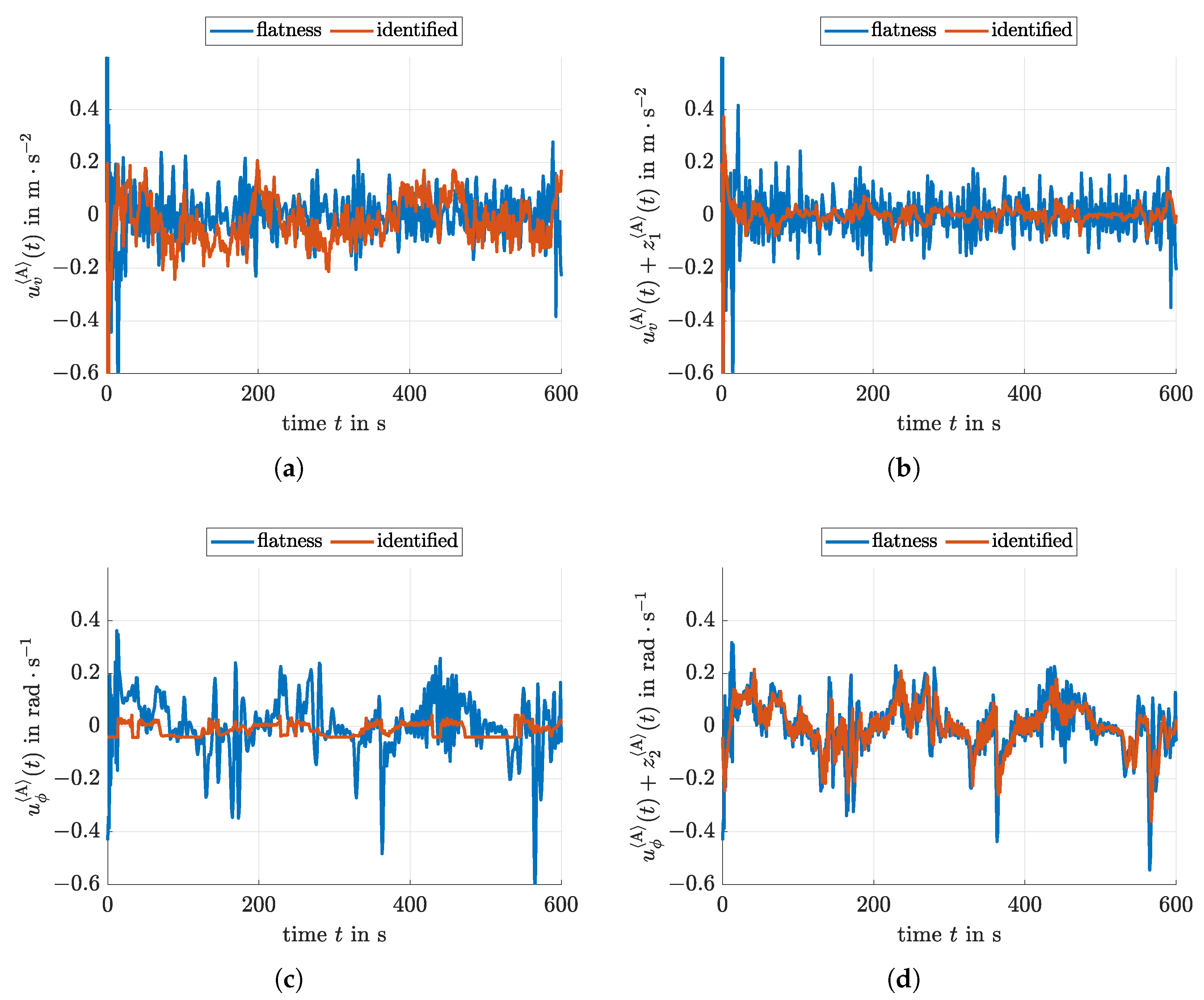
2.3.1. Identified Model-Based Representation of the Effective System Inputs
2.3.2. Signal-Based Representation of the Effective System Inputs
2.3.3. A Posteriori Reconstruction of Input Disturbances
3. Ellipsoidal State Estimation Procedure
3.1. Ellipsoidal State Prediction Step
- Step P1:
- Applyto the ellipsoid in (27). The shape matrix of the outer ellipsoid enclosure of the image set is described by an ellipsoid with the shape matrixwhere is the smallest value for which the linear matrix inequalityis satisfied for all with
- Step P2:
- Compute interval bounds for the termwhich accounts for a non-zero ellipsoid midpoint with , , and defined according to (26), (28), and (29). Inflate the outer ellipsoid bound described by the shape matrix (31) withFor a definition of the interval-valued generalization of the Euclidean norm operator, see [12].
- Step P3:
- Compute the updated ellipsoid midpoint asThe outer ellipsoidal enclosure of at the time instant then becomeswhere
- Step P4:
- Determine an ellipsoidal enclosure (the aforementioned Löwner–John ellipsoid) for the summandaccording toTo determine this ellipsoid from an interval vector with the corresponding vertices , , whereholds, the minimum-volume Löwner–John ellipsoid is determined by solving the linear matrix inequality constrained optimization problemFurther details concerning these inequality constraints, the choice of the number of vertices L, and a simplified version purely based on interval analysis are discussed in [12]. Moreover, note that the exact volume minimization task would require the solution of an optimization task in which a complex determinant minimization task is involved. This task is replaced by the minimization of a matrix trace as described in Appendix C of [24]. Due to the linearity of the trace operator (and its close-to-optimal behavior), this version is used for the proposed ellipsoid prediction step when determining the bounds .
- Step P5:
- Compute an ellipsoidal enclosure of the Minkowski sum of the two intermediate results and according towith the new midpointand the updated shape matrixresulting from the closed-form expressionwith
3.2. Ellipsoidal Measurement Update Step
- Step C1:
- Determine the common center point for the bounds of the intersection, where the center point must be included in all ellipsoids to be intersected;
- Step C2:
- Determine the shape matrices for the outer ellipsoid bound according to the computation of Dikin ellipsoids according to [27].
4. Modeling of Uncertainty
4.1. Uncertainty in the Dynamic System Model: Bounded Process Noise
4.2. Quantification of Measurement Uncertainty: Bounded Measurement Noise
| Algorithm 1: Contractor-based sensor calibration. |
|
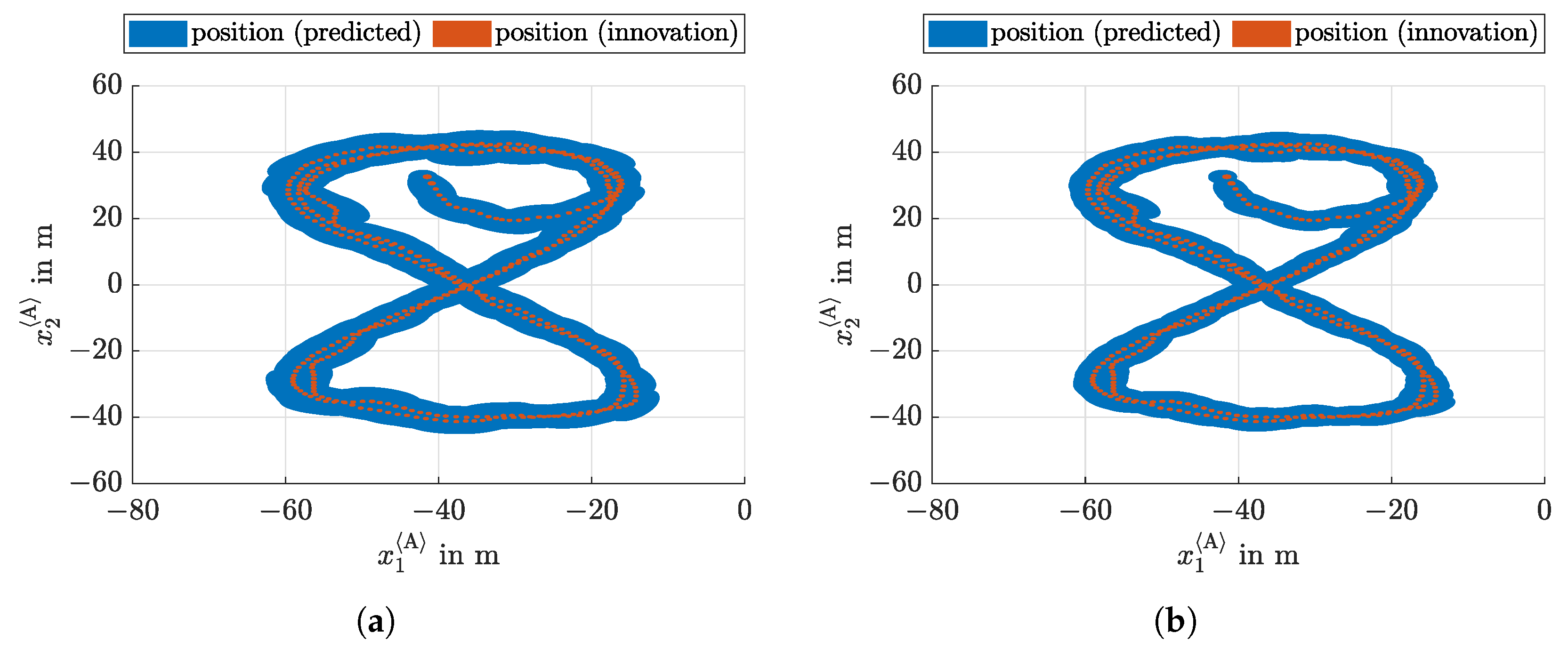
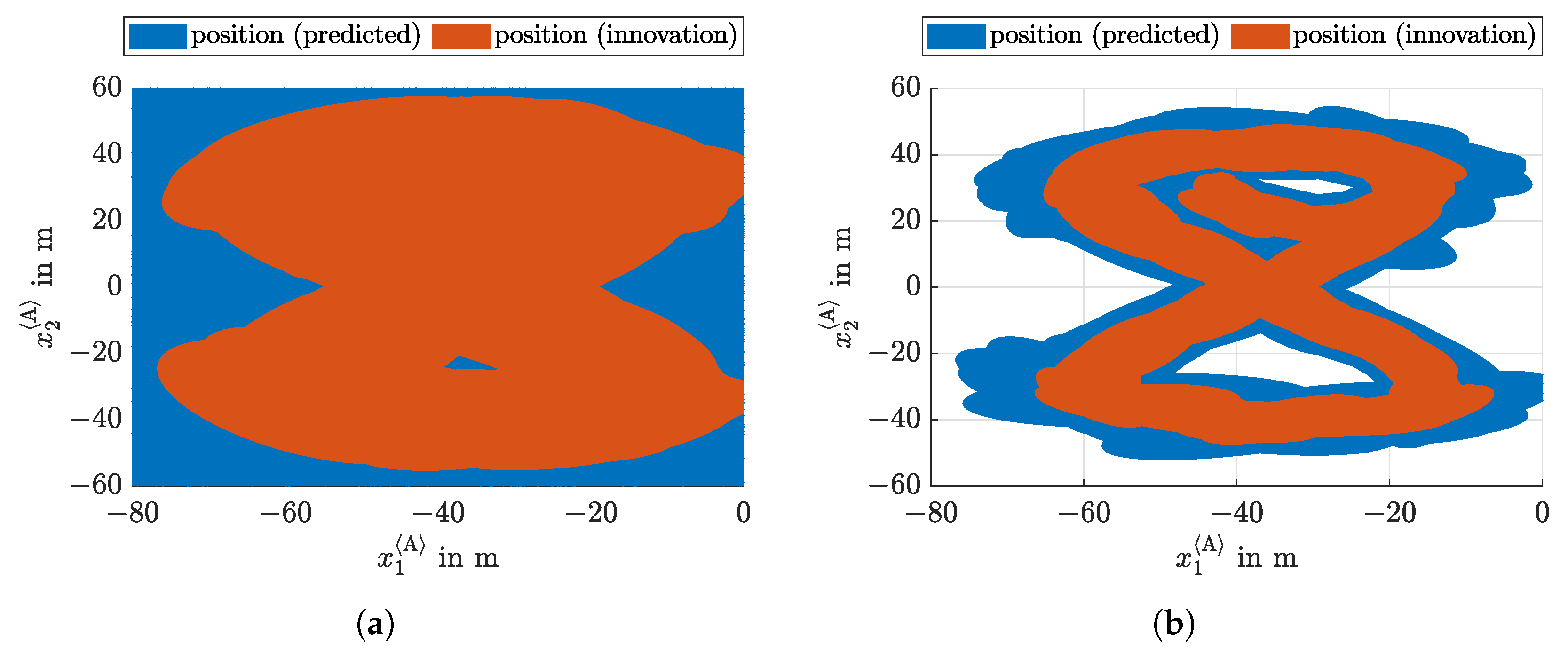
5. Estimation Results
5.1. Localization without Heading Measurement
5.2. Localization with Heading Measurement
5.3. Proof of Collision Avoidance
6. Conclusions and Outlook on Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fossen, T. Handbook of Marine Craft Hydrodynamics and Motion Control, 2nd ed.; Wiley: Hoboken, NJ, USA, 2021. [Google Scholar]
- Xue, Y.; Liu, Y.; Xue, G.; Chen, G. Identification and Prediction of Ship Maneuvering Motion Based on a Gaussian Process with Uncertainty Propagation. J. Mar. Sci. Eng. 2021, 9, 804. [Google Scholar] [CrossRef]
- Mayer, G. Interval Analysis and Automatic Result Verification; De Gruyter Studies in Mathematics; De Gruyter: Berlin, Germany; Boston, MA, USA, 2017. [Google Scholar]
- Rauh, A.; Bourgois, A.; Jaulin, L. Union and Intersection Operators for Thick Ellipsoid State Enclosures: Application to Bounded-Error Discrete-Time State Observer Design. Algorithms 2021, 14, 88. [Google Scholar] [CrossRef]
- Rauh, A.; Jaulin, L. A Computationally Inexpensive Algorithm for Determining Outer and Inner Enclosures of Nonlinear Mappings of Ellipsoidal Domains. Int. J. Appl. Math. Comput. Sci. AMCS 2021, 31, 399–415. [Google Scholar]
- Houska, B.; Villanueva, M.; Chachuat, B. Stable Set-Valued Integration of Nonlinear Dynamic Systems using Affine Set-Parameterizations. Siam J. Numer. Anal. 2015, 53, 2307–2328. [Google Scholar] [CrossRef][Green Version]
- Kurzhanskii, A.B.; Vályi, I. Ellipsoidal Calculus for Estimation and Control; Birkhäuser: Boston, MA, USA, 1997. [Google Scholar]
- Becis-Aubry, Y. Ellipsoidal Constrained State Estimation in Presence of Bounded Disturbances. 2020. Available online: arxiv.org/pdf/2012.03267v1.pdf (accessed on 13 March 2022).
- Rego, B.S.; Scott, J.K.; Raimondo, D.M.; Raffo, G.V. Set-Valued State Estimation of Nonlinear Discrete-Time Systems with Nonlinear Invariants Based on Constrained Zonotopes. Automatica 2021, 129, 109638. [Google Scholar] [CrossRef]
- Berz, M.; Makino, K. Verified Integration of ODEs and Flows Using Differential Algebraic Methods on High-Order Taylor Models. Reliab. Comput. 1998, 4, 361–369. [Google Scholar] [CrossRef]
- Bünger, F. A Taylor Model Toolbox for Solving ODEs Implemented in MATLAB/INTLAB. J. Comput. Appl. Math. 2020, 368, 112511. [Google Scholar] [CrossRef]
- Rauh, A.; Rohou, S.; Jaulin, L. An Ellipsoidal Predictor–Corrector State Estimation Scheme for Linear Continuous-Time Systems with Bounded Parameters and Bounded Measurement Errors. Front. Control Eng. 2022, 3, 785795. [Google Scholar] [CrossRef]
- Kühn, W. Rigorous Error Bounds for the Initial Value Problem Based on Defect Estimation. Technical Report. 1999. Available online: http://www.decatur.de/personal/papers/defect.zip (accessed on 6 March 2022).
- Stengel, R. Optimal Control and Estimation; Dover Publications, Inc.: Mineola, NY, USA, 1994. [Google Scholar]
- Anderson, B.D.O.; Moore, J.B. Optimal Filtering; Dover Publications, Inc.: Mineola, NY, USA, 2005. [Google Scholar]
- Hashim, H.A. A Geometric Nonlinear Stochastic Filter for Simultaneous Localization and Mapping. Aerosp. Sci. Technol. 2021, 111, 106569. [Google Scholar] [CrossRef]
- Borisov, A.; Bosov, A.; Miller, B.; Miller, G. Passive Underwater Target Tracking: Conditionally Minimax Nonlinear Filtering with Bearing-Doppler Observations. Sensors 2020, 20, 2257. [Google Scholar] [CrossRef] [PubMed]
- Khatib, O. The Potential Field Approach And Operational Space Formulation In Robot Control. In Adaptive and Learning Systems: Theory and Applications; Narendra, K.S., Ed.; Springer: Boston, MA, USA, 1986; pp. 367–377. [Google Scholar]
- Tanaka, Y.; Tsuji, T.; Kaneko, M. Dynamic Control of Redundant Manipulators Using the Artificial Potential Field Approach with Time Scaling. Artif. Life Robot. 1999, 3, 79–85. [Google Scholar] [CrossRef]
- Wang, W.; Zhu, M.; Wang, X.; He, S.; He, J.; Xu, Z. An Improved Artificial Potential Field Method of Trajectory Planning and Obstacle Avoidance for Redundant Manipulators. Int. J. Adv. Robot. Syst. 2018, 15, 1–13. [Google Scholar] [CrossRef][Green Version]
- Fliess, M.; Lévine, J.; Martin, P.; Rouchon, P. Flatness and Defect of Nonlinear Systems: Introductory Theory and Examples. Int. J. Control 1995, 61, 1327–1361. [Google Scholar] [CrossRef][Green Version]
- Rauh, A.; Bourgois, A.; Jaulin, L.; Kersten, J. Ellipsoidal Enclosure Techniques for a Verified Simulation of Initial Value Problems for Ordinary Differential Equations. In Proceedings of the 5th International Conference on Control, Automation and Diagnosis (ICCAD’21), Grenoble, France, 3–5 November 2021. [Google Scholar]
- John, F. Extremum Problems with Inequalities as Subsidiary Conditions. In Studies and Essays Presented to R. Courant on his 60th Birthday; Interscience Publishers, Inc.: New York, NY, USA, 1948; pp. 187–204. [Google Scholar]
- Tarbouriech, S.; Garcia, G.; Gomes da Silva, J.; Queinnec, I. Stability and Stabilization of Linear Systems With Saturating Actuators; Springer: London, UK, 2011. [Google Scholar]
- Halder, A. On the Parameterized Computation of Minimum Volume Outer Ellipsoid of Minkowski Sum of Ellipsoids. In Proceedings of the IEEE Conference on Decision and Control (CDC), Miami Beach, FL, USA, 17–19 December 2018; pp. 4040–4045. [Google Scholar] [CrossRef][Green Version]
- Noack, B.; Klumpp, V.; Hanebeck, U. State Estimation with Sets of Densities Considering Stochastic and Systematic Errors. In Proceedings of the 2009 12th International Conference on Information Fusion, FUSION, Seattle, WA, USA, 6–9 July 2009; pp. 1751–1758. [Google Scholar]
- Henrion, D.; Tarbouriech, S.; Arzelier, D. LMI Approximations for the Radius of the Intersection of Ellipsoids: Survey. J. Optim. Theory Appl. 2001, 108, 1–28. [Google Scholar] [CrossRef]
- Kalman, R. A New Approach to Linear Filtering and Prediction Problems. Trans. Asme—J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef][Green Version]
- Becis-Aubry, Y. Bounded-Error Constrained State Estimation in Presence of Sporadic Measurements 2022. Available online: arxiv.org/abs/2202.13900 (accessed on 13 March 2022).
- John, K.; Rauh, A.; Bruschewski, M.; Grundmann, S. Towards Analyzing the Influence of Measurement Errors in Magnetic Resonance Imaging of Fluid Flows—Development of an Interval-Based Iteration Approach. Acta Cybern. 2020, 24, 343–372. [Google Scholar] [CrossRef][Green Version]
- Dehnert, R.; Damaszek, M.; Lerch, S.; Rauh, A.; Tibken, B. Robust Feedback Control for Discrete-Time Systems Based on Iterative LMIs with Polytopic Uncertainty Representations Subject to Stochastic Noise. Front. Control Eng. 2022, 2, 786152. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Identified | Flatness-Based | Identified | Flatness-Based | |
|---|---|---|---|---|
| Model | Rep. | Model | Rep. | |
| Constant Bounds | Time-Varying | Constant Bounds | Time-Varying | |
|---|---|---|---|---|
| in | ||||
| in | ||||
| in | ||||
| in | 0.1447 | 0.1445 | 0.0955 | 0.0977 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rauh, A.; Gourret, Y.; Lagattu, K.; Hummes, B.; Jaulin, L.; Reuter, J.; Wirtensohn, S.; Hoher, P. Experimental Validation of Ellipsoidal Techniques for State Estimation in Marine Applications. Algorithms 2022, 15, 162. https://doi.org/10.3390/a15050162
Rauh A, Gourret Y, Lagattu K, Hummes B, Jaulin L, Reuter J, Wirtensohn S, Hoher P. Experimental Validation of Ellipsoidal Techniques for State Estimation in Marine Applications. Algorithms. 2022; 15(5):162. https://doi.org/10.3390/a15050162
Chicago/Turabian StyleRauh, Andreas, Yohann Gourret, Katell Lagattu, Bernardo Hummes, Luc Jaulin, Johannes Reuter, Stefan Wirtensohn, and Patrick Hoher. 2022. "Experimental Validation of Ellipsoidal Techniques for State Estimation in Marine Applications" Algorithms 15, no. 5: 162. https://doi.org/10.3390/a15050162